As well as any other communication stack, BTstack is a collection of state machines that interact with each other. There is one or more state machines for each protocol and service that it implements. The rest of the architecture follows these fundamental design guidelines:
-
Single threaded design - BTstack does not use or require multi-threading to handle data sources and timers. Instead, it uses a single run loop.
-
No blocking anywhere - If Bluetooth processing is required, its result will be delivered as an event via registered packet handlers.
-
No artificially limited buffers/pools - Incoming and outgoing data packets are not queued.
-
Statically bounded memory (optionally) - The number of maximum connections/channels/services can be configured.
Figure below shows the general architecture of a BTstack-based single-threaded application that includes the BTstack run loop. The Main Application contains the application logic, e.g., reading a sensor value and providing it via the Communication Logic as a SPP Server. The Communication Logic is often modeled as a finite state machine with events and data coming from either the Main Application or from BTstack via registered packet handlers (PH). BTstack’s Run Loop is responsible for providing timers and processing incoming data.
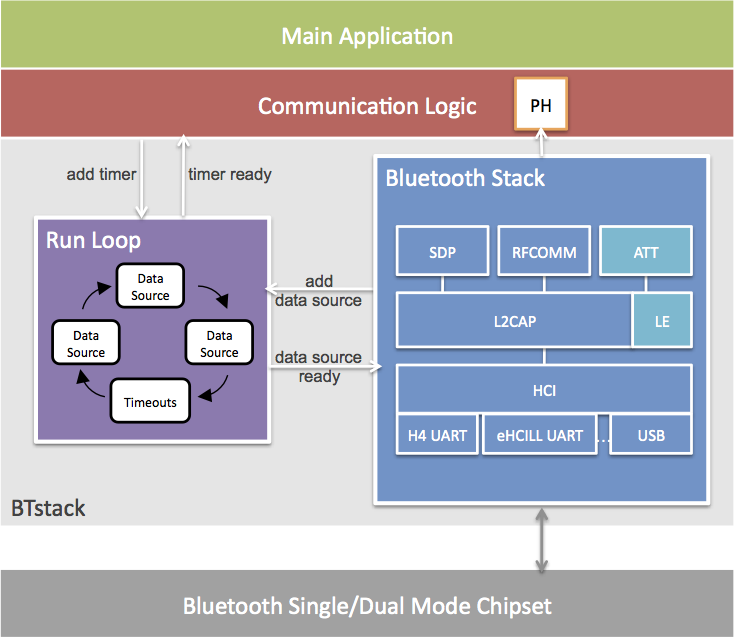
Single threaded design
BTstack does not use or require multi-threading. It uses a single run loop to handle data sources and timers. Data sources represent communication interfaces like an UART or an USB driver. Timers are used by BTstack to implement various Bluetooth-related timeouts. For example, to disconnect a Bluetooth baseband channel without an active L2CAP channel after 20 seconds. They can also be used to handle periodic events. During a run loop cycle, the callback functions of all registered data sources are called. Then, the callback functions of timers that are ready are executed.
For adapting BTstack to multi-threaded environments check here.
No blocking anywhere
Bluetooth logic is event-driven. Therefore, all BTstack functions are non-blocking, i.e., all functions that cannot return immediately implement an asynchronous pattern. If the arguments of a function are valid, the necessary commands are sent to the Bluetooth chipset and the function returns with a success value. The actual result is delivered later as an asynchronous event via registered packet handlers.
If a Bluetooth event triggers longer processing by the application, the processing should be split into smaller chunks. The packet handler could then schedule a timer that manages the sequential execution of the chunks.
No artificially limited buffers/pools
Incoming and outgoing data packets are not queued. BTstack delivers an incoming data packet to the application before it receives the next one from the Bluetooth chipset. Therefore, it relies on the link layer of the Bluetooth chipset to slow down the remote sender when needed.
Similarly, the application has to adapt its packet generation to the remote receiver for outgoing data. L2CAP relies on ACL flow control between sender and receiver. If there are no free ACL buffers in the Bluetooth module, the application cannot send. For RFCOMM, the mandatory credit-based flow-control limits the data sending rate additionally. The application can only send an RFCOMM packet if it has RFCOMM credits.
Statically bounded memory
BTstack has to keep track of services and active connections on the various protocol layers. The number of maximum connections/channels/services can be configured. In addition, the non-persistent database for remote device names and link keys needs memory and can be be configured, too. These numbers determine the amount of static memory allocation.